Buildroot Giriş¶
Buildroot Edinme¶
Buildroot’un 2019.02 versiyonunu kullanacağız. Bunun için ya GIT ile indirip kendi branchimizi yada direk olarak 2019.02 paketini (tarball) indireceğiz. Bu kitapta buildroot için tarball üzerinden yürüyeceğiz.
GIT
cd /opt/workspace
git clone git://git.busybox.net/buildroot
cd buildroot
git checkout -b beagle_dev 2019.02
TARBALL
cd /opt/workspace
wget https://buildroot.org/downloads/buildroot-2019.02.5.tar.bz2
tar xf buildroot-2019.02.5.tar.bz2
mv buildroot-2019.02.5 buildroot
cd buildroot
Buildroot ile Basit Bir RootFS Oluşturma¶
Buildroot içerisinde kernel ve u-boot’ta olduğu gibi hazır defconfig dosyaları bulunmkatadır. Kullandığımız Beaglebone-Black içinde hazır bir config dosyası (beaglebone_defconfig) vardır ancak Buildroot ile sıfırdan başlamak kolay olduğu için biz hazır gelen defconfig yerine kendi config dosyamızı oluşturacağız.
Öncelikle basit bir konfigürasyon yapalım:
cd buildroot
make menuconfig
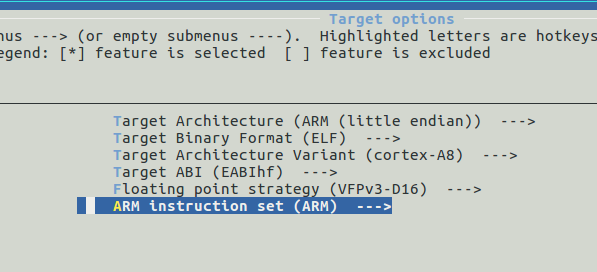
Target Options bölümünden
- Mimariyi ARM (little endian)
- Mimariyi varyantını cortex-A8
olarak seçelim. Bu verileri AM335x datasheetinden elde ettik.
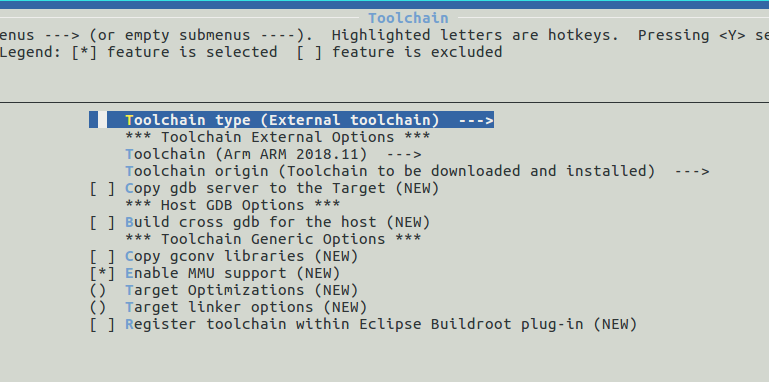
Bir üst menüye dönelim ve Toolchain bölümünden
- Toolchain tipini External Toolchain
olarak seçelim. Harici toolchain olarak Linaro 2018.11 toolchain kullanılıyor. buildroot’un kendi toolchaini ben hiç kullanmadım ve oldukça zaman aldığı kaynaklarda söyleniyor.
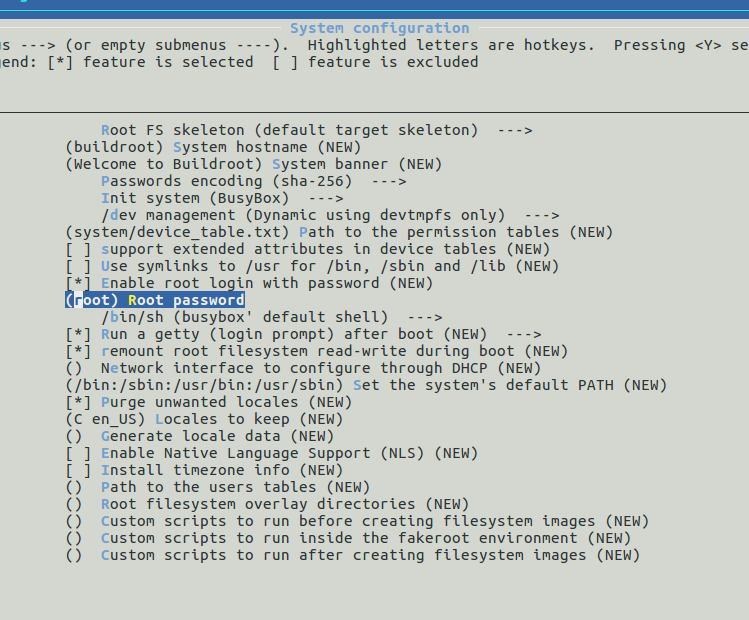
Bir üst menüye dönelim ve System configuration bölümünden
- Root şifresini root
olarak ayarlayalım.
Ana menüde görebileceğiniz üzere Kernel ve Bootloader bölümleri adlarından da kolayca anlaşılacağı gibi Buildroot aracılığı ile kernel ve u-boot derlemek için kullanılırlar.
Target packages bölümü sistem üzerindeki varolacak paketleri belirlemede kullanılır. Buildroot içinde yaklaşık olarak 2500 paket bulunmaktadır. Bu menü içerisinde gezmenizi tavsiye ederim.
Son olarak ana menüden Filesystem images bölümüne göz atalım. Bu menüde oluşturacağımız RootFS’in tipini belirliyoruz. Şuan sizde sistem tar formatında çıktı üretecektir.
Peki şimdi kaydedip çıkalım ve ilk derlememizi alalım.
make
Ekranda bir süre Buildroot’un yaptığı işlemler kayacak ve en sonunda ilk RootFS imajımız oluşacak.
Buildroot’un oluşturduğu çıktılar output/images klasörü altındadır. Şuan için sadece rootfs.tar bu klasörün altında olmalıdır.
ls output/images/
SD-Kartımızı takalım ve oluşturduğumuz RootFS imajını atalım.
sudo tar xvf output/images/rootfs.tar -C /media/$USER/rootfs
sync
Kartı boot ettiğimiz zaman U-Boot kerneli yükleyecek, kernel ise rootfs’e bağlanarak login aşamasına gelecektir.
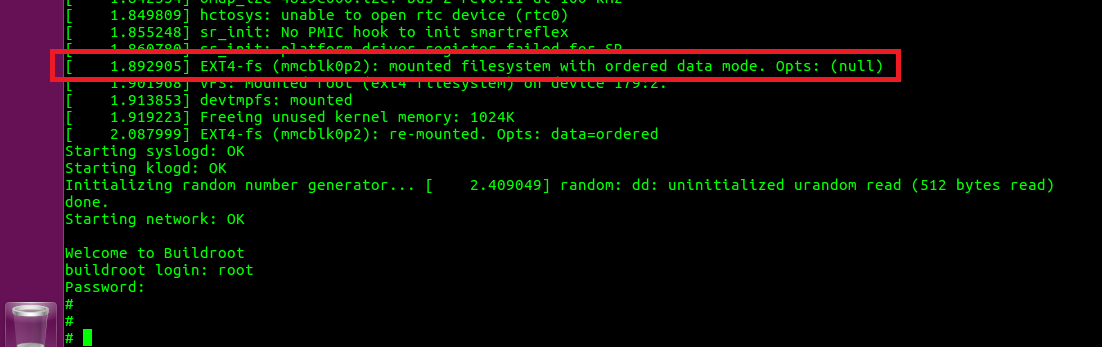
Tebrikler :) İlk defa tüm parçaları ile bir Gömülü Linux Sistemini oluşturdunuz.
Şimdi Buildroot’ta hazırladığımız config dosyasını kaydedelim.
make savedefconfig
mv defconfig configs/beagle_basic_defconfig